(last updated 2018)
1-DOF Climbing Robot – Dynamics and Kinematics Competition

I designed and developed a novel 1-DOF climbing robot to scale a 12-foot vertical wire rack. The competition was judged on which robot climbed the highest, and therefore I ideated a design that maintained stable contact with the rack at all times.
Quadrotor Obstacle Course Simulation
I designed a two-stage PID controller for a simulated quadrotor to navigate an obstacle course in minimal time. The first controller outputs the quadrotor angle values (roll, pitch, and yaw) given the desired position input, and the second set of controllers are mapped to the output torque signals for each motor given the quadrotor angle inputs. The physics of the quadrotor and environment were built from scratch.
Inverse Kinematic Position Model for Redundant Manipulators
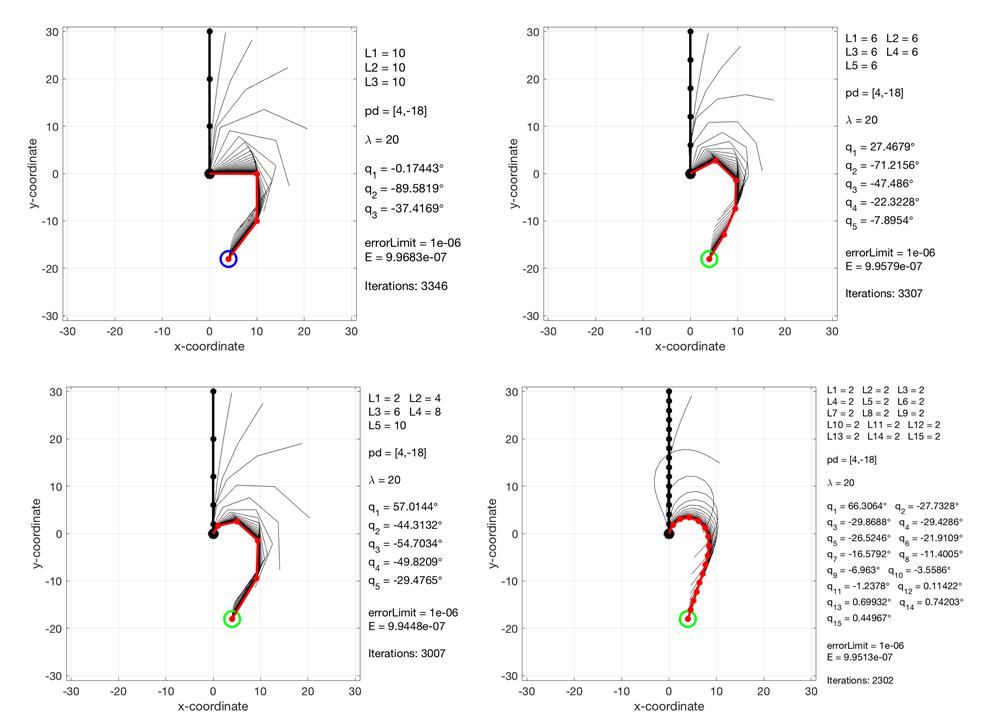
I programmed an inverse kinematic position control model for 2D redundant manipulators for a self-guided study in a “Linear Algebra and its Applications” course. This project demonstrated the use of Jacobian matrices, the pseudoinverse method, and least-squares approximation for the practical application of robot manipulator control.
Mini-Golfing Robot – Mechanical Design Competition
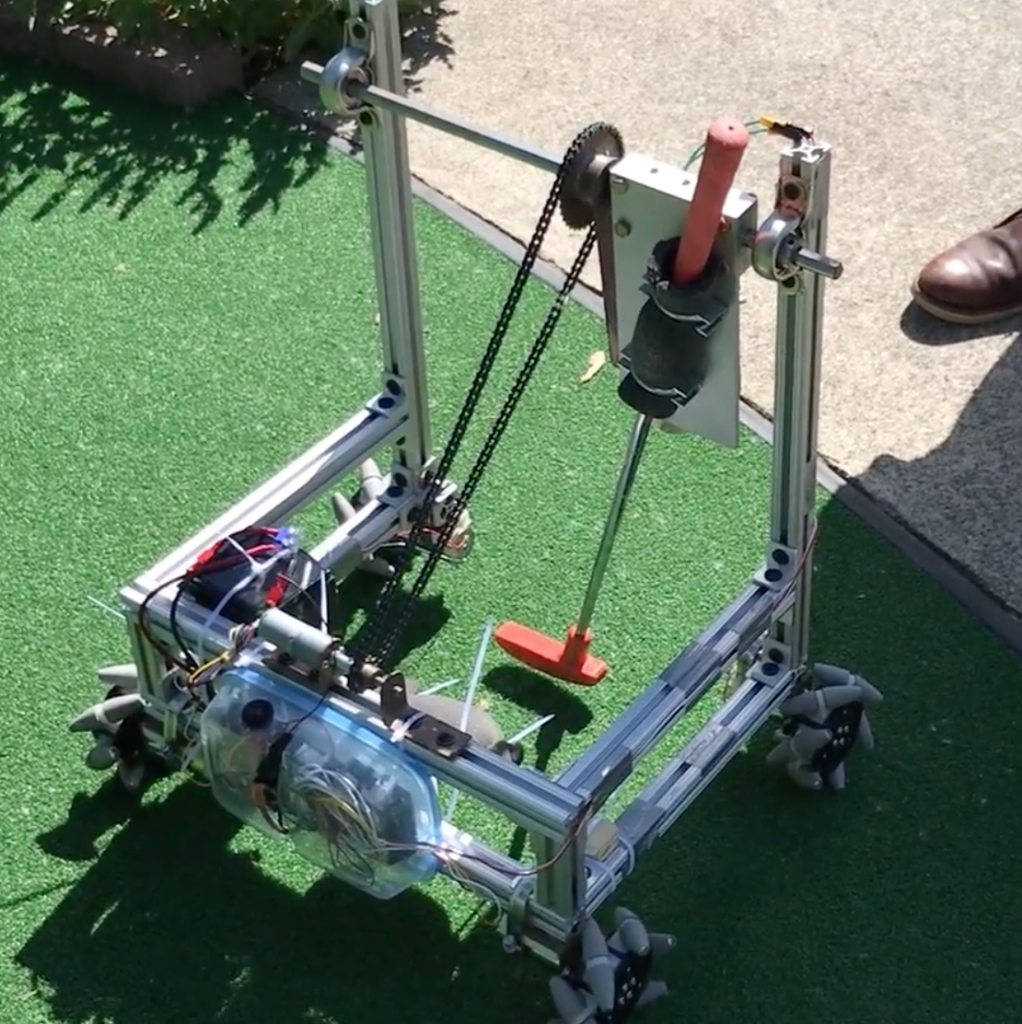
I led a team of eight students in the development of a mini-golfing robot. In addition to designing for functionality, we also focused on investigating and manipulating the performance of mecanum wheels on turf.